Dans le paysage en constante évolution de la robotique, un nouveau venu surprend par son audace et son ingéniosité : Argus, un robot doté de 20 pattes télescopiques. Conçu par une équipe de chercheurs de l’université Duke, ce robot ne ressemble à aucun autre. Là où la plupart des robots s’inspirent du corps humain ou animal, Argus adopte une architecture inédite, circulaire et sans orientation fixe, capable d’explorer le monde avec une agilité remarquable. Grâce à sa conception isotrope, il peut se déplacer avec efficacité dans toutes les directions sans jamais nécessiter de se retourner, un exploit technologique qui promet d’élargir considérablement les possibilités d’utilisation des robots dans des environnements complexes et variés.
L’intérêt d’Argus dépasse le simple exploit mécanique. En combinant une structure géométrique sophistiquée à une technologie avancée de perception environnementale, il incarne une innovation majeure dans la mobilité robotique. Chaque pas de ce robot à 20 pattes est pensé pour assurer stabilité, adaptation et réactivité face à différents terrains – du sable mouvant aux surfaces humides ou accidentées. Ce déploiement de capacités ouvre des perspectives passionnantes, aussi bien pour l’exploration scientifique que pour des missions industrielles ou de secours où la polyvalence et la robustesse sont clés. Dans cet article, nous allons plonger au cœur des aspects qui font d’Argus un jalon singulier dans le monde des robots, de son design révolutionnaire à ses performances sur le terrain, en passant par les principes mathématiques qui sous-tendent son fonctionnement.
Une conception novatrice : comprendre la structure à 20 pattes d’Argus pour une mobilité inédite
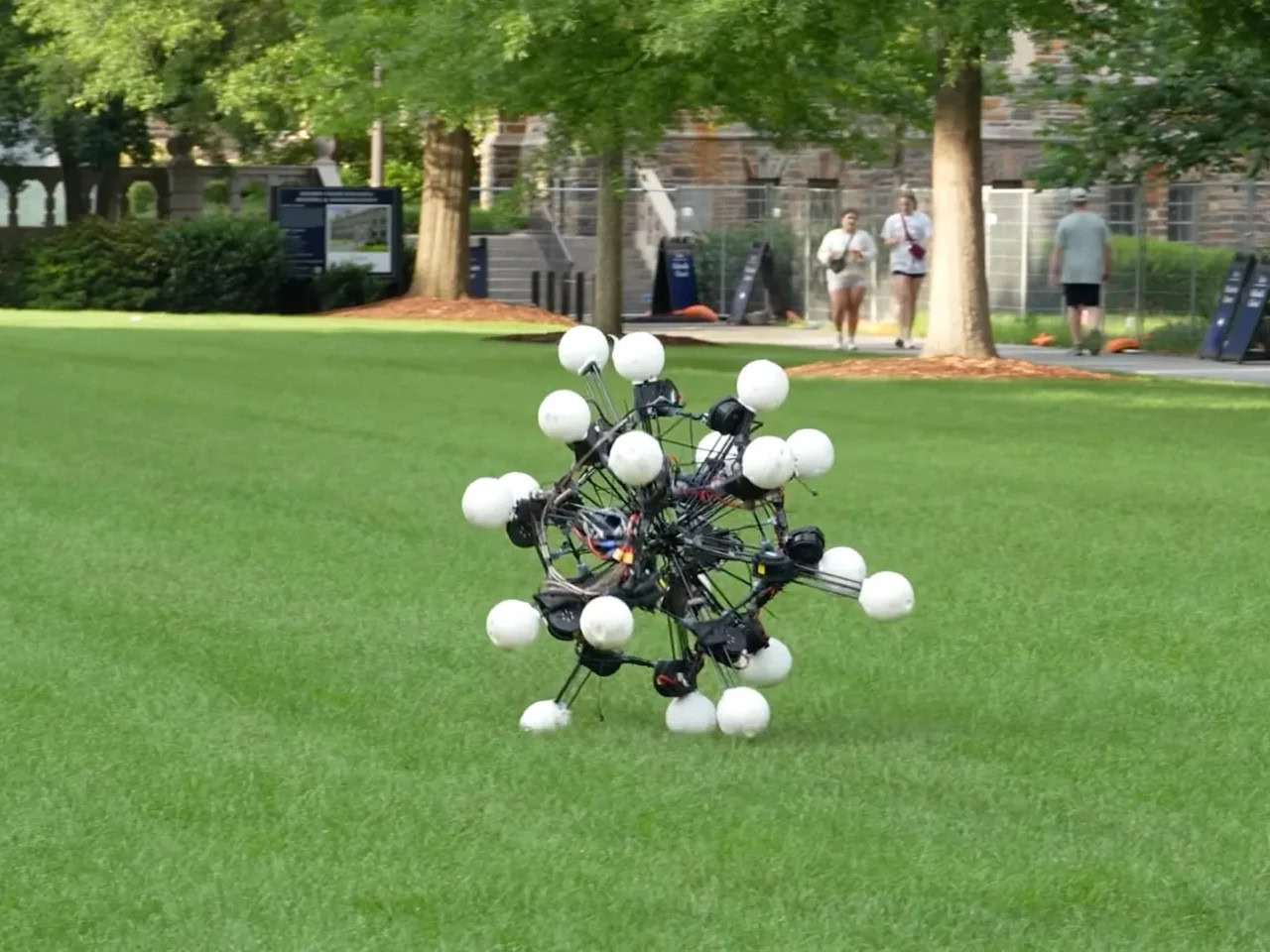
L’originalité d’Argus commence par son apparence et sa forme qui détonnent dans l’univers souvent anthropomorphe de la robotique. Plutôt qu’un squelette avec une orientation définie, ce robot arbore une structure sphérique dotée d’un dodécaèdre à 12 faces pentagonales. Autour de ce noyau, sont réparties uniformément 20 jambes télescopiques qui offrent au robot une liberté de mouvement quasi totale.
Cette configuration géométrique n’a pas été choisie au hasard ; elle résulte d’une exploration minutieuse dans plus de 1 500 configurations différentes, grâce à des simulations poussées. Le but ? Atteindre un haut niveau d’« isotropie dynamique », un concept mathématique qui garantit la capacité de se déplacer avec la même efficacité peu importe la direction choisie. Avec un score remarquable de 0,91 sur cette métrique, Argus surpasse largement les robots quadrupèdes et humanoïdes classiques, qui plafonnent autour de 0,6.
L’absence de distinction entre l’avant, l’arrière ou les côtés simplifie profondément la logique de contrôle et la planification de mouvement. La robotique traditionnelle doit gérer le retournement ou les changements d’orientation, ce qui peut ralentir et compliquer les déplacements. Argus, lui, ajuste ses pattes pour se propulser, s’équilibrer ou contourner un obstacle sans perdre un instant à « recalibrer » son axe. Cette faculté promet des avantages évidents dans des parcours d’exploration difficiles ou imprévisibles.
La technologie des jambes télescopiques et la perception omnidirectionnelle
Chaque patte est équipée d’une caméra de profondeur, multipliant ainsi les angles de vision et offrant au robot une perception complète et tridimensionnelle de son environnement. Cette visibilité à 360 degrés sans besoin de tourner, coupler à la réactivité de ses 20 jambes, permet à Argus d’analyser rapidement les terrains et de réagir avec agilité et précision.
Cette combinaison entre mobilité mécanique et intelligence sensorielle est une innovation majeure. Par exemple, dans un environnement forestier parsemé de ronces et de débris, Argus peut ajuster instantanément la hauteur et la position de ses membres pour éviter les obstacles ou franchir des seuils jusqu’à 12,7 cm d’épaisseur. Sur des sols glissants ou meubles, sa stabilité est maintenue par la répartition homogène des forces issues de ses multiples points d’appui.
Tests et performances réels : Argus entre dans la phase pratique de l’exploration du monde
Les avancées théoriques ne valent que si elles s’accompagnent d’une robustesse et d’une fiabilité sur le terrain. Argus a passé avec brio plusieurs batteries de tests sur le campus universitaire. Ces essais ont permis d’observer les capacités réelles du robot à évoluer sur plusieurs types de sols : sable granulé, pelouse humide, béton rugueux, sentiers forestiers et même surfaces inégales ou mouillées.
Lors de ces tests, Argus a démontré qu’il pouvait conserver sa mobilité quelle que soit la direction dans laquelle il était initialement placé. Il franchit sans encombre des obstacles assez élevés, symboles d’un défi habituel pour la robotique classique, capable de buter sur de simples irrégularités. Grâce à sa configuration isotrope, sa coordination motrice se révèle d’une fluidité remarquable, offrant une nouvelle référence en matière d’agilité robotique.
Un compagnon adaptable pour les missions délicates
Au-delà des terrains prévisibles, Argus a particulièrement brillé lors de simulations d’interventions en milieu instable : environnements post-catastrophes, zones de recherche en milieu naturel difficile, ou même dans des contextes industriels inadaptés aux machines conventionnelles. Sa capacité à se repositionner instantanément et à recouvrir son équilibre même après avoir été poussé ou destabilisé, fait de lui un candidat idéal pour des opérations de sauvetage où la flexibilité est indispensable.
Les perspectives ouvertes à la robotique mobile sont vastes, notamment dans l’exploration subaquatique ou extra-terrestre, où les terrains accidentés exigent de monstrueuses capacités d’adaptation. Argus, par son architecture multi-pattes et sa perception omnidirectionnelle, préfigure une nouvelle génération de robots autonomes, capables d’aller là où le pas humain est limité.
Les enjeux et défis techniques derrière la conception d’Argus
Mettre au point une machine aussi complexe demande de relever plusieurs défis majeurs. L’intégration mécanique des 20 jambes télescopiques doit répondre à des contraintes d’espace, de poids, d’énergie et de coordination. Chaque jambe doit non seulement pouvoir se tendre et se rétracter avec fluidité, mais également s’adapter instantanément à la configuration du terrain tout en supportant le poids du noyau central.
La robotique moderne nécessite aussi une intelligence embarquée capable de gérer ces nombreux degrés de liberté en temps réel. Le robot doit ajuster ses appuis immédiatement pour éviter la chute, ce qui impose une réactivité logicielle intense couplée à une précision mécanique parfaite. Ce mariage entre hardware et software dépasse souvent les défis classiques de la locomotion robotique où le nombre de membres est réduit et le contrôle plus simple.
Gestion énergétique et durabilité matérielle
Le fonctionnement du robot implique aussi une consommation énergétique maîtrisée. Chaque jambe télescopique requiert un actionneur motorisé, consommant de l’énergie à chaque mouvement. Les chercheurs ont dû concevoir des systèmes optimisés pour limiter la consommation, notamment par des algorithmes intelligents de planification des mouvements et par un choix de matériaux légers et résistants.
En parallèle, la résistance aux conditions d’usage intensif – poussière, humidité, choc – est un facteur crucial. Argus a été doté de protections mécaniques et électroniques avancées afin d’évoluer longtemps dans des environnements hostiles sans défaillance.
| Critère | Solution technique | Avantages |
|---|---|---|
| Mobilité multidirectionnelle | Architecture dodécaédrique avec 20 jambes réparties uniformément | Stress réduit sur mécanismes, mouvements fluides dans toutes directions |
| Perception omnidirectionnelle | Caméras de profondeur sur chaque patte | Vision 360° sans rotation, meilleure analyse de l’environnement |
| Stabilité et équilibre | Coordination avancée des jambes télescopiques | Reprise rapide après perturbations, franchissement d’obstacles jusqu’à 12,7 cm |
| Autonomie énergétique | Optimisation algorithmique et matériaux légers | Longue durée d’opération, poids maîtrisé |
L’impact d’Argus sur l’avenir de la robotique et son rôle dans l’exploration globale
Ce robot s’inscrit dans une tendance croissante qui délaisse les formes traditionnelles pour des solutions plus polyvalentes et adaptatives. En 2026, la recherche robotiques vise de plus en plus à créer des machines capables d’évoluer dans des environnements complexes et imprévisibles sans intervention humaine excessive.
Argus, par son concept de mobilité isotrope et son système sensoriel intégré, incarne un virage prometteur. Les avantages sont multiples : il repense les normes de déplacement robotique en éliminant la dépendance à une orientation, ce qui ouvre la voie à la manipulation et l’exploration dans des zones confinées ou difficiles d’accès. Que ce soit dans la surveillance environnementale, la maintenance industrielle, ou encore l’exploration spatiale et planétaire, ce type de robot offre une mobilité inégalée et une robustesse nouvelle.
Exemples d’applications potentielles dans divers secteurs
- Recherche et sauvetage : Argus peut naviguer dans des décombres ou des environnements instables, localiser des victimes, et transmettre des informations grâce à sa vision omnidirectionnelle.
- Exploration scientifique : Sur des terrains inaccessibles aux humains, comme les volcans ou fonds marins peu profonds, il permet de collecter des données précises.
- Maintenance industrielle : Dans des usines ou plateformes isolées, il inspecte, détecte des anomalies, et agit rapidement sans intervention humaine directe.
- Exploration spatiale : Ses capacités d’adaptation en font un outil potentiel dans des missions planétaires, où la diversité des sols et l’environnement hostile sont la norme.
L’avenir d’Argus demeure prometteur, car sa conception soulève des questions fondamentales sur la manière de penser la mobilité artificielle. Le pari de cette boule mécanique à 20 jambes n’est pas seulement d’illustrer une technologie avancée, mais aussi de repousser les limites de ce qui est convenu comme la norme en robotique.
Une innovation audacieuse questionnant les standards des robots classiques
Argus remet en cause l’idée reçue selon laquelle un robot doit nécessairement posséder une orientation et une configuration corporelle basées sur des modèles « naturels ». Il n’a ni bras ni visage, ni sens unique de déplacement. Cette absence de hiérarchie entre avant et arrière décuple son adaptabilité et évite les contraintes classiques imposées par les designs conventionnels.
Cette approche bouscule les codes autant dans le domaine de la recherche pure que dans l’application concrète. Outre un gain d’efficacité dans les déplacements, elle offre une meilleure résilience face aux aléas du terrain et des interactions physiques imprévisibles.
Un défi pour l’intelligence robotique et le contrôle moteur
Structurer le contrôle de 20 pattes en coordination parfaite est un défi en soi. Le logiciel doit gérer simultanément la planification de trajectoire, la correction posturale et la gestion de multiples capteurs, tout en assurant une consommation d’énergie optimisée. Ce travail multidimensionnel illustre la complexité grandissante des systèmes robotiques contemporains, où innovation matérielle et logicielle doivent progresser de concert.
En synthèse, Argus illustre une nouvelle ère dans la robotique, celle d’une mobilité non conventionnelle et d’une perception décuplée. Par son agilité exceptionnelle et son audace conceptuelle, ce robot trace la voie vers des machines capables de parcourir le monde avec une liberté jusqu’alors inégalée.
Qu’est-ce que l’isotropie dynamique en robotique ?
L’isotropie dynamique désigne la capacité d’un robot à déplacer avec une efficacité similaire dans toutes les directions, sans privilégier une orientation particulière, ce qui augmente considérablement sa polyvalence.
Quels terrains Argus est-il capable de franchir ?
Argus a été testé avec succès sur différents types de sols comme le sable, l’herbe, le béton, les sentiers forestiers et les surfaces glissantes, franchissant des obstacles jusqu’à 12,7 cm.
Pourquoi Argus ne nécessite-t-il pas d’avoir une orientation définie ?
Son design sphérique avec 20 pattes réparties uniformément élimine la nécessité d’un avant ou arrière, lui permettant de se déplacer dans toutes les directions sans devoir se retourner.
Quels sont les principaux défis techniques rencontrés dans la conception d’Argus ?
Les principaux défis concernent l’intégration mécanique des nombreuses pattes, la gestion en temps réel de leur coordination, ainsi que la maîtrise de la consommation énergétique et la robustesse des matériaux.
Quelles applications pourraient bénéficier d’Argus ?
Argus peut grandement faciliter les recherches et sauvetages, l’exploration scientifique de terrains difficiles, la maintenance industrielle en zones isolées, ainsi que les missions d’exploration spatiale.